Some friends buy me a nice MP3 player for my car last year (birthday): LAC-M6500R
This stuff looks great and you can even plug a hard-drive. The main issue is that the firmware only support 999 files on a single USB device, so that’s enougth for ~4Go of MP3 but not more. So I decided to buy some USB sticks, it’s far more simple .. no external power supply, and just the room to place a quite large MP3 collection (simply buy 2/3 sticks and that rules)

That’s ok, but hum, as you can see on this picture the USB plug is on the front panel. And that’s a mess, cause you have to unplugged it when you want to remove the front panel (some infamous guys already try to open my car 4 times..), or to put a CD in. Beside this is a gift, I decided to open it, and try add a external USB in the back. I think my friends will understand this: “If you can’t open it, you don’t own it” ..
First, I decided to open the front panel, to look how the USB plug is connected. As you can see on the aboves pictures, the USB power-supply come form the main board.
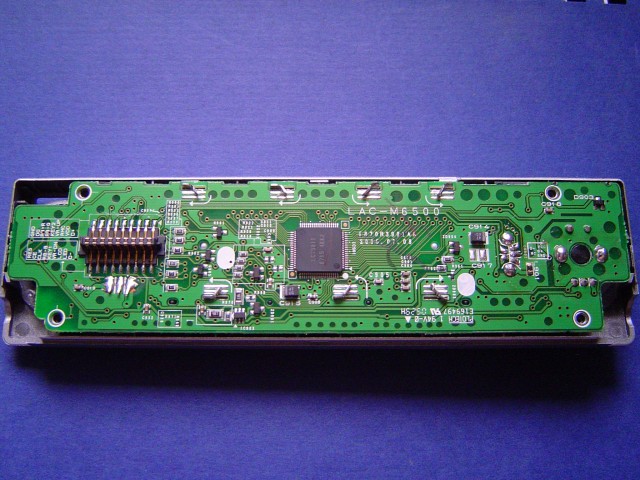

That’s fine.. We simply have to add take the power from the source ..
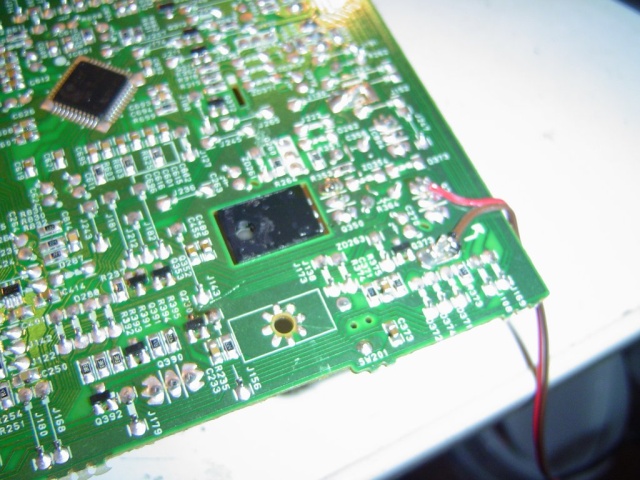
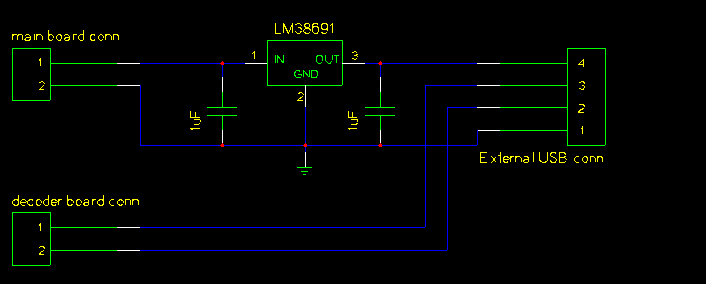
When I look closely, I discover that the PSU provide 5.5v instead of 5.0v. The main reason, is that the front panel contain a small chips do the final regulation.. Ok, we can do the same ? :) I used a low drop 5.0v regulator: LP38691 with 2 small caps..

The final step, is to connect the data bus (DATA- / DATA+), this was really hard, because the front panel USB bus is connected to the main decoder board throught a small wire. As I’m not able to find the right plug, I decided to solder it on the board ..

So we have something like this:
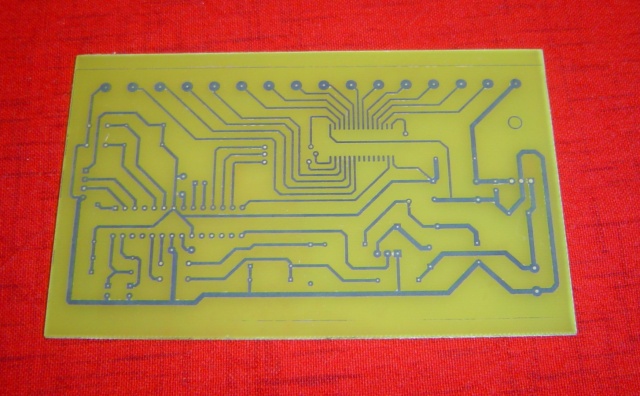
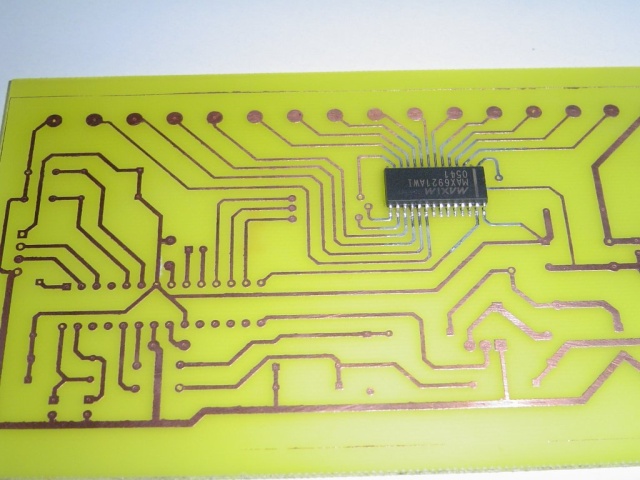
The small PCB:
As you can see on this picture, on the left, there is the wires from the main board, and the 5.0v regulator. On the right the wire that goes to the decoder board, and the external new USB connector.
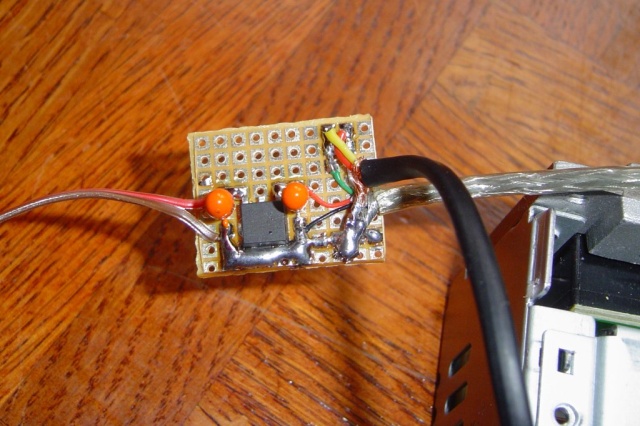
Here the finished product:

Ok, that’s fine, now, you can place this small board in system (there is a lot of room), and enjoy the external USB cable ;)